庭園鉄道日記(LGB Gゲージ)で「Contact」と一致するもの
あけましておめでとうございます。今年もよろしくお願いいたします。
2011年を迎え、元旦からの3日間は好天に恵まれました。少し遅めになりましたが、新年のご挨拶を申し上げます。また、みなさんにとりまして、よい年であることをお祈りします。
 今年のお正月は、初詣など出かけることが多く、今日は、久しぶりにゆっくりと汽車を走らせています。年末は、雪が降ったり風が強かったりしたので、LGBのMulti Train Systemのソフトウェアのマニュアルをあらためて読み、Contact controlという自動運転に挑戦していました。
今年のお正月は、初詣など出かけることが多く、今日は、久しぶりにゆっくりと汽車を走らせています。年末は、雪が降ったり風が強かったりしたので、LGBのMulti Train Systemのソフトウェアのマニュアルをあらためて読み、Contact controlという自動運転に挑戦していました。
これまではSchedule controlといって、Track Contactの反応を見ながら、ポイントを切り替えたり、列車の発車・停車を制御するプログラム(Schedule)を書いてコンピュータ運転をしていました。
Contact controlは、プログラムを書かずに、Track Contactやポイントマシンなどに、ソフトウェア上でいろいろな挙動を記録しておき、列車がそれぞれのTrack Contactを通過した際に、 ポイントを切り替えるなどいろいろな動作をさせることで、列車を制御するもののようです。
実は、LGBのMulti Train Systemでは、Contact controlの方が標準となっています。でも、列車を細かく停止させたり、発車させようとすると、Breaking ModuleやらTrain Detection Moduleなどが必要なようで、ちょっと大変そうです。(まだ、十分に使いこなしているわけではありません)
LGBのMulti Train System、まだまだ、奥が深いです。
予備の線路等の有効利用を考えていたのですが、出前運行をすることとしました。2010年5月3日に三重県伊賀市の伊賀鉄道上野市駅を中心に開催される「伊賀線まつり」に参加します。
国内では珍しいGゲージ(軌間45mm・縮尺1/22.5)で、しかも、コンピュータ(MTS,DCC)で、待避線や引込み線の運行を行う予定です! 興味のある方、当日は、ぜひ見に来てくださいますようお願いします。
 現在、レイアウトの準備中でおおよそ3m×8mのものを提案しています。今日は、ポイントの配線とTrackContactのテストをしました。上の写真で、3編成が見えますが、当日は4編成で運行するつもりです。機関車や客車、貨車は何を持っていこうか考えているところです。
現在、レイアウトの準備中でおおよそ3m×8mのものを提案しています。今日は、ポイントの配線とTrackContactのテストをしました。上の写真で、3編成が見えますが、当日は4編成で運行するつもりです。機関車や客車、貨車は何を持っていこうか考えているところです。
 出前運行は、初めてです。写真は殺風景ですが、当日は、実行委員会で菜の花を準備いただけるようですので、当方としても、うまくいくよう努力します。
出前運行は、初めてです。写真は殺風景ですが、当日は、実行委員会で菜の花を準備いただけるようですので、当方としても、うまくいくよう努力します。
また、他のイベント等についても、都合がつけば積極的に出て行きたいと考えています。基本的には、子どもをつれた家族のみなさんに楽しんでいただければと思っています。また、「庭園鉄道」ですので、お花や庭関係もOKです。近畿地方、東海地方で興味のある方はメールで連絡してください。
それから、伊賀鉄道(伊賀線)では、忍者列車が走っています。

コンピュータによる自動運転にかかせないFeedback Moduleの使い方です。以前は、LGB社製のFeedback Interface(型番55070)が純正品であったのですが、もう製造されていないようで、カタログからも姿を消してしまいました。
代替品として、Massoth社がDiMAX Feedback Module for DiMAX and LGB© MZS II + IIIを販売しています。
マニュアルの説明は、接続については、図入りでくわしく書いてありますが、ソフトウェア(MTS-PC)との連携がわかりにくいと思いますので、長文になりますが、設定や動作について詳しく書いてみます。(お約束ですが、設定時のトラブル等は自己責任でお願いします。)
 1つのFeedback Moduleには、8個のトラックコンタクトを接続することができます。
1つのFeedback Moduleには、8個のトラックコンタクトを接続することができます。
使用するまでの流れは次のとおりです。
1 Feedback ModuleのCV値の設定
2 動作テスト
3 トラックコンタクトの線路への設置と配線
4 制御用ソフトウェア(MTS-PC)へのトラックコンタクトの登録
5 MTS-PC用のスケジュールの作成と運行
では、詳しく書いてみます。
【1】 Feedback ModuleのCV値の設定
CV1の値を、129~253の間の値に設定します(購入当初は、値が0になっています。また、コンピュータで制御する場合、LGBでは1~128でなく、129以降を使うことが推奨されています。)。
CV値を設定する際は、マニュアルに図が掲載されているとおりに、3b,GND,4aの3つの端子を接続する必要があります(変更される場合もあるので必ずマニュアルを確認してください)。
CV値は、普通は、1台目のFeedback Moduleが129,2台目が133となります(2台目以降、番号は129から4ずつ増やします。)。CV1=129にすると、Feedback Moduleの端子とトラックコンタクトの番号は次の関係になります。
端子 1a = トラックコンタクト 129a
端子 1b = トラックコンタクト 129b
端子 2a = トラックコンタクト 130a
端子 2b = トラックコンタクト 130b
端子 3a = トラックコンタクト 131a
端子 3b = トラックコンタクト 131b
端子 4a = トラックコンタクト 132a
端子 4b = トラックコンタクト 132b
【2】 動作テスト(ここでは、1でCV値を129に設定したとします。 )
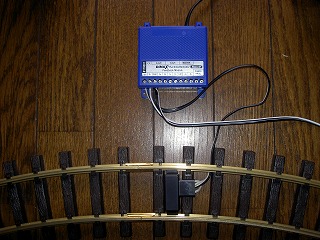
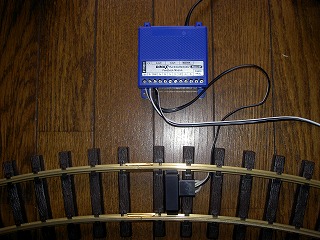
いきなり線路に設置するのでなく、まず、動作テストをします。、マニュアルに図が掲載されているとおりにフィードバックモジュールとトラックコンタクトを接続するとともに、セントラルステーション、コンピュータインターフェイス、フィードバックモジュールを接続します。
MTS-PCがインストールされたフォルダの中に、「All_Contacts_129_256.lgb」がありますので、Fileメニューの「Open Track Layout」から開きます。ずらりとトラックコンタクトが並んだレイアウト?が表示されます。
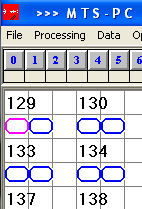
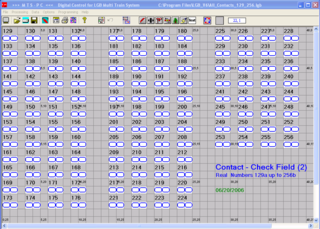 COMポートを指定した後、Processingメニューから、First Startを選びます。トラックコンタクトに磁石を近づけると、画面上で該当番号のトラックコンタクトが、青からピンクになり、2秒で青に戻ります。次の図は129aが動作した瞬間です。
COMポートを指定した後、Processingメニューから、First Startを選びます。トラックコンタクトに磁石を近づけると、画面上で該当番号のトラックコンタクトが、青からピンクになり、2秒で青に戻ります。次の図は129aが動作した瞬間です。
【3】 トラックコンタクトの線路への設置と配線
自分のレイアウトの必要な線路の位置にトラックコンタクトを設置し、配線します。
【4】 制御用ソフトウェア(MTS-PC)へのトラックコンタクトの登録
MTS-PCの画面上の線路に、トラックコンタクトを配置します。配置するとトラックコンタクトの設定画面が現れますので、必要な項目を設定します。
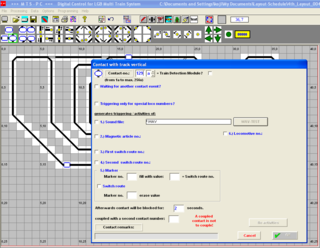 最初に、トラックコンタクトの番号を入力します(この番号は一度入力すると変更できません。間違えた場合画面上から一度トラックコンタクトを削除して、やり直す必要があります。)。 次に、各設定項目を入力しますが、私の場合は、「Afterwards contact willl be blocked for:」の項目だけです。デフォルトの2秒にしてあります。この値はあとから変更できますので、動作確認ができるまでは、5秒等長めにしておいた方が、わかりやすくていいと思います。
最初に、トラックコンタクトの番号を入力します(この番号は一度入力すると変更できません。間違えた場合画面上から一度トラックコンタクトを削除して、やり直す必要があります。)。 次に、各設定項目を入力しますが、私の場合は、「Afterwards contact willl be blocked for:」の項目だけです。デフォルトの2秒にしてあります。この値はあとから変更できますので、動作確認ができるまでは、5秒等長めにしておいた方が、わかりやすくていいと思います。
トラックコンタクトを設置したら、底面にマグネットをつけた機関車を走らせてみましょう。スケジュールを書く必要はありません。ユニバーサルリモートやロコリモートで普通に走らせます。
うまく動作すると、機関車がトラックコンタクトを通過する毎に、画面上の該当箇所のトラックコンタクトが青からピンクに変色し、設定した時間を過ぎると、青に戻ります。
注 MTS-PCのOptionsメニューのTypes of Automatic ControlをContact Controlにすると、ピンクから青にもどります。Types of Automatic ControlをSchedule controlにしていると、ピンクのまま戻りません。(1月3日に追記)
ここで、うまく色が変わらない場合は、配線や設定を見なおします。 無事成功したら、いよいよスケジュールを書いてみましょう!
【5】 MTS-PC用のスケジュールの作成と運行
サンプル
129aを使って、129aを通過したら停止、20秒後に、出発という動作を繰り返します。スケジュールの開始時は、機関車は129aを通過した状態にしてください。
A *初期化
!, START *ラベル「START」
L, 1, B, +7 *機関車1を停止状態から、速度7加速。
K, 129a, B *トラックコンタクト129aを列車が通過するまで待つ。
L, 1, B, -14 *機関車1を速度14減速(7から14減らすと停止します。-7でもいいです)。
Z, 200 *20秒待ちます。
G, START *「START」へジャンプする(無限ループ)。
E *終了
☆説明しようと思うと大変ですね!
最近、コンピュータインターフェイス(55060)を入手され、コンピュータによる制御を少しずつ始められた方がいます。サウンド、ライト等のファンクションによる制御がうまくいかないようです。実は、自分も同じ経験をしており、原因を追究した結果、英語版のOSでないとだめだという結論に落ち着いています(うちでは、WindowsXP Home英語版です。)(うちでは、WindowsXP Home英語版です。)。
経過は、以下のリンクに書いてあります。
http://www.ttnet.org/~garden_railway/2008/02/post-33.html
(音は、右下のスピーカーアイコンの右のボリュームを触らないとでない場合があります。)
ただし、上記リンクの文章中の日本語晩Windows XPを使った方法については、「日本語WindowsXPのコントロールパネル「地域と言語のオプション」→「詳細設定」→「Unicodeプログラムでないプログラムの言語」を「英語(米国)」に設定した上で制御用のソフトを動かすことでした。」と書いてありますが、他にも安定しないことが多くあり、最終的に、英語版のOSで動かすのがベストと考えています。
でも、もしかすると、自分が気づいていない原因があるかもしれません。日本語OSでも動けばいいのですが、何か解決策がみつかるといいのですが・・・。
次のビデオは、TrackContactを通り過ぎたら、汽笛、ベルを鳴らすようにプログラムしたものです。

久しぶりに、コンピュータでの運行パターを思いつきましたので、さっそくスケジュール(コンピュータ運行用の簡易プログラム)を作成してみました。
2箇所の待避線と駅に向かって左側の複線区間を使って、進行方向の異なる2両の編成を待避線で交互に運行させることと、一部、複線区間でのすれ違い運転を実現しました。
まず、頭の中で列車の動きとポイントの切り替えを考え、2つの編成それぞれのスケジュールを書きます。その後、間違い探しをして完成です。今回は、進行方向の異なる2両を走行させるため、ミスがあると最悪の場合、正面衝突です。それを避けるために、コンピュータでは、2つの編成のプログラムを同時に動かしつつ、1つの編成だけ走行させます。もう1つの列車の役目は、自分が磁石を持って歩きます。磁石をTrackContact(LGB17100)にかざしてコンピュータに列車が通過したように認識させて、問題なく動くか確かめます。
本当は、コンピュータ上で、シミュレーションできるといいのですが、MTSのソフトウェアでは無理なのです。それでは走行風景をごらんください。コンピュータによる列車の自動運転は、動いたりとまったり、すれ違うのを、手放しでぼけ~っとみているだけでいいので楽ですし、本物みたいな気がして楽しいです。
そこで、今回は、Feedback Interface(Massoth社製)とTrack Contactを増設することにしました。実は、1個のFeedback Interfaceに8個のTrack Contactを接続できるのですが、すでに、8個接続しており、今回の9個目となり、Feedback Interfaceの増設が必要になります。
Feedback Interfaceの増設は、既設のFeedback Interfaceの「Slave」端子と、新設のFeedback InterfaceのSlave端子を4芯のモジュラーケーブルで繋ぎます。あとは、Track Contactを接続すればOKです。

 増設した場所は図の位置です。
増設した場所は図の位置です。 こんな運転ができるようになりました。増設したTrack Contactは、ビデオの中では2回働いています。
こんな運転ができるようになりました。増設したTrack Contactは、ビデオの中では2回働いています。・1回目(前進)にリバース区間に入る前に、Threeway Switchを直進から右折に切り替え
・2回目(後進)にリバース区間を通過した後に、列車を停止させ、前進に切り替え出発
(動画では、2編成同時に運行していますので、走行音が2つ聞こえます。)
今回は、Electric Uncouplerを2台使って、1両のディーゼル機関車で、2組の貨車の編成を切り離したり、連結したりする運転をしてみました。(MTSとコンピュータで制御してます。)
実は、以前に「車両の切り離し・・・Electric Uncoupler, 150 mm(LGB10560)」で、車両によっては、切り離しがうまくいかないと書いたのですが、逆に考えれば、うまく切り離しできる車両の組み合わせを選べばいいのです。あと、列車の速度と貨車を増やして試行錯誤したところ、今回の編成ではほぼ100%切り離しができました。
今回の場合も、列車の位置検出をFeedback InterfaceとTrack Contact、コンピュータで行っています。
LGB製の列車制御用ソフトウェアMTS-PCを用いてコンピュータで5編成を制御してみました。大きく分けて、次の3パターンです。
内周:機関車1(Stainz)・・・駅前で停車、発進
外周:機関車2(Spreewald)と機関車3(ディーゼル)・・・待避線による交互運転
別路線:機関車4(Cambrai)と機関車5(Heidi)・・・入れ替えによる交互運転
これを実現するために、コンピュータ上でそれぞれのパターンの制御プログラム(MTS-PCではスケジュールといいます)を書きます。スケジュールには、初期化、ポイントの切り替え、列車の速度指定、位置検出、繰り返し、条件分岐などの命令を組み合わせて記述します。重要なのは、TrackContactとFeedback Interfaceによる列車の位置検出です。これを導入することで、MTS上で、このような運行が実現できました。
実際の走行風景は動画をごらんください。上記の3つのスケジュールを同時に動作させています。
コンピュータ上の画面はこんな感じです。線路上の8カ所に青の楕円があります。これが位置検出に使うTrack Contactを設置してある場所です。車両底面に磁石を取り付けた列車がTrack Contactを通過すると、コンピュータに信号が送られます。その信号に対して、列車の停止、発信、ポイントの切り替えなどの動作を行わせています。
先週、今週と2週間かけて、屋外のレイアウト変更と配線を終えました。さっそくコンピュータで制御するためのスケジュールを書いてみました。
まだ、写真や映像をお見せできないのが残念ですが、8箇所で位置検出し、5編成を制御してみました。駅で停めるのはもちろん、待避線との交互運転など、だんだん、本当の列車運行みたいになってきました。
ただ、ときどき、位置検出に失敗して、停車しなかったり衝突したりするので、改善する必要があります。
Scheduleを書いてみました。MTS-PCとFeedbackInterfaceとの関係をみながら、とりあえず、往復運転ができるようにしてみました。
以前にも書きましたが、MTS-PCソフトウェアは、今ひとつ使い勝手が悪いですが、良くできていると感じさせられます。Scheduleを書くための構文がもっと充実していたら、言うことありません。
というわけで、往復運転の動画です。線路の両端に黒いTrackContact(17100)があります。
TrackContact→FeedbackModule→CentralStation2→ComputerInterface
→MTS-PC
という流れでTrackContactの通過情報がコンピュータに伝わり、MTS-PCで列車を制御しています。
コンピュータとMTS-PCソフトウェアで列車を制御するために、列車の位置を検出する必要があります。たとえば、次のようなことをしたいと思います。
・駅で列車を停止させる
・ポイントの手前で列車を停止し、ポイントを切り替え、別の列車を走行させる
・トンネルの手前で警笛を鳴らす
LGBのMTSでは、Feedback Interface(55070)とTrack Contact(17100)、EPL Loco Magnetを使い、MTS-PCソフトウェアでScheduleを作成することで、上記のような運転が実現します。
ただし、LGBのFeedBack Interface(55070)は品薄で、Massoth社のFeedback Moduleを入手しました。MassothのFeedbackInterfaceはMTS Central Station2でも動作します。(うちの鉄道はまだ2なのです。)
また、EPL Loco MagnetもMassothのLocomagnetにしました。
それでは、今から、室内用のScheduleを書いてみます。うまく動いたら、動画をアップします。
Feedback Interface(55070)とTrack Contact(17100)
Locomagnetを動力車の底面に両面テープで貼り付けたところです。