庭園鉄道日記(LGB Gゲージ)でタグ「位置検出」が付けられているもの
先週、今週と2週間かけて、屋外のレイアウト変更と配線を終えました。さっそくコンピュータで制御するためのスケジュールを書いてみました。
まだ、写真や映像をお見せできないのが残念ですが、8箇所で位置検出し、5編成を制御してみました。駅で停めるのはもちろん、待避線との交互運転など、だんだん、本当の列車運行みたいになってきました。
ただ、ときどき、位置検出に失敗して、停車しなかったり衝突したりするので、改善する必要があります。
コンピュータとMTS-PCソフトウェアで列車を制御するために、列車の位置を検出する必要があります。たとえば、次のようなことをしたいと思います。
・駅で列車を停止させる
・ポイントの手前で列車を停止し、ポイントを切り替え、別の列車を走行させる
・トンネルの手前で警笛を鳴らす
LGBのMTSでは、Feedback Interface(55070)とTrack Contact(17100)、EPL Loco Magnetを使い、MTS-PCソフトウェアでScheduleを作成することで、上記のような運転が実現します。
ただし、LGBのFeedBack Interface(55070)は品薄で、Massoth社のFeedback Moduleを入手しました。MassothのFeedbackInterfaceはMTS Central Station2でも動作します。(うちの鉄道はまだ2なのです。)
また、EPL Loco MagnetもMassothのLocomagnetにしました。
それでは、今から、室内用のScheduleを書いてみます。うまく動いたら、動画をアップします。
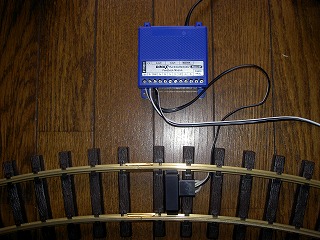
Feedback Interface(55070)とTrack Contact(17100)
Locomagnetを動力車の底面に両面テープで貼り付けたところです。
2月24日の「コンピュータによる制御」では、とりあえず、MTS Computer Interface(55060)を使って簡単なスケジュールを書いて自動運行させるところまでできました。
本当は、次の段階として、列車の位置の検出に挑戦する予定でしたが、それに必要なFeedback Interface等の到着が遅れていて、まだ、実現できていません。
そこで、今日は、屋外で3つの列車を自動運行してみることにしました。使用するMTSのソフトウェア(MTS-PC)は、使い勝手はそれほどよくないように思いますが、最低必要な機能はそろっている感じがします。
我が家のレイアウトは、3つのエンドレスループがあり、各ループがポイントを経由してつながっています。つまり、各編成がループ内を走るようにポイントを設定しておけば、衝突なしに3編成同時に走行できるわけです。今回は、その状態で、3つの編成を別々に、停車→加速→走行→減速→停止の繰り返しを行わせました。
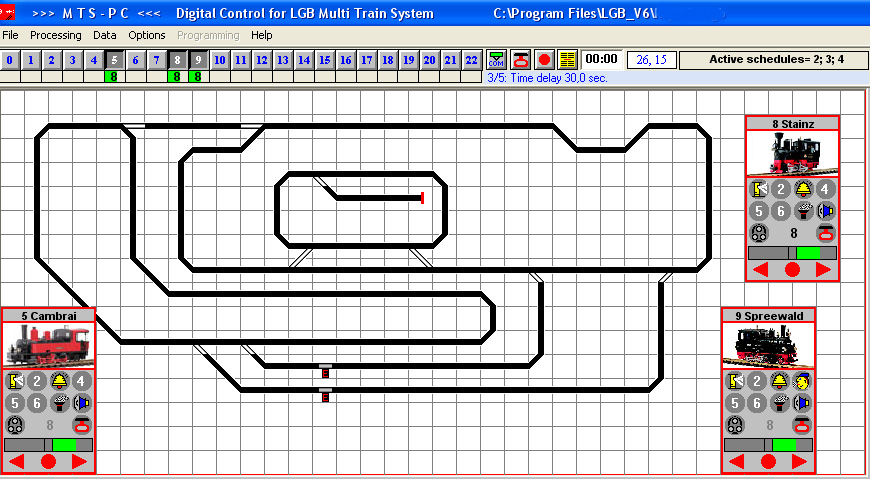 3つの列車を同時に制御するには、各編成用のスケジュール(制御プログラム)を3つ書いて保存しておきます。
3つの列車を同時に制御するには、各編成用のスケジュール(制御プログラム)を3つ書いて保存しておきます。
プログラムは、
初期化→※ラベル→速度8まで加速→○秒間そのまま→速度0まで減速
→○○秒間そのまま→「※ラベル」へジャンプ
という無限ループです。これを、動力車のID番号ごとスケジュール1、スケジュール2、スケジュール3と3つ書いて保存します。
もう一つメインになるプログラムを書きます。
初期化→スケジュール1実行→○秒間そのまま
→スケジュール2実行→○秒間そのまま
→スケジュール3実行→○秒間そのまま→終了
メインプログラムを実行させると、3つの編成がそれぞれのスケジュールに従って独立して、走行・停車を繰り返します。
今は、○秒間で走行、停止を繰り返していますので、トンネルやカーブなど、あらゆるところで、止まってしまいます。でも、これまでのように、走らせたままよりは、止まってはまた走り出すことで、ずいぶんと、見ていて楽しくなってきました。ときどき、うまく駅の前で止まってくれたりすると、結構、気分がいいものです。
Feedback Interfaceによる列車通過の検知ができるようになると、駅の前で停車させることもできるようです。来週か再来週になりそうですが・・・!