庭園鉄道日記(LGB Gゲージ)でタグ「feedback」が付けられているもの
コンピュータによる自動運転にかかせないFeedback Moduleの使い方です。以前は、LGB社製のFeedback Interface(型番55070)が純正品であったのですが、もう製造されていないようで、カタログからも姿を消してしまいました。
代替品として、Massoth社がDiMAX Feedback Module for DiMAX and LGB© MZS II + IIIを販売しています。
マニュアルの説明は、接続については、図入りでくわしく書いてありますが、ソフトウェア(MTS-PC)との連携がわかりにくいと思いますので、長文になりますが、設定や動作について詳しく書いてみます。(お約束ですが、設定時のトラブル等は自己責任でお願いします。)
 1つのFeedback Moduleには、8個のトラックコンタクトを接続することができます。
1つのFeedback Moduleには、8個のトラックコンタクトを接続することができます。
使用するまでの流れは次のとおりです。
1 Feedback ModuleのCV値の設定
2 動作テスト
3 トラックコンタクトの線路への設置と配線
4 制御用ソフトウェア(MTS-PC)へのトラックコンタクトの登録
5 MTS-PC用のスケジュールの作成と運行
では、詳しく書いてみます。
【1】 Feedback ModuleのCV値の設定
CV1の値を、129~253の間の値に設定します(購入当初は、値が0になっています。また、コンピュータで制御する場合、LGBでは1~128でなく、129以降を使うことが推奨されています。)。
CV値を設定する際は、マニュアルに図が掲載されているとおりに、3b,GND,4aの3つの端子を接続する必要があります(変更される場合もあるので必ずマニュアルを確認してください)。
CV値は、普通は、1台目のFeedback Moduleが129,2台目が133となります(2台目以降、番号は129から4ずつ増やします。)。CV1=129にすると、Feedback Moduleの端子とトラックコンタクトの番号は次の関係になります。
端子 1a = トラックコンタクト 129a
端子 1b = トラックコンタクト 129b
端子 2a = トラックコンタクト 130a
端子 2b = トラックコンタクト 130b
端子 3a = トラックコンタクト 131a
端子 3b = トラックコンタクト 131b
端子 4a = トラックコンタクト 132a
端子 4b = トラックコンタクト 132b
【2】 動作テスト(ここでは、1でCV値を129に設定したとします。 )
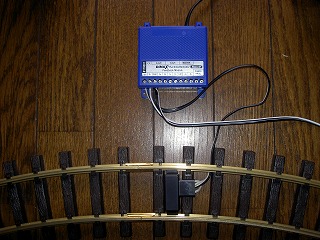
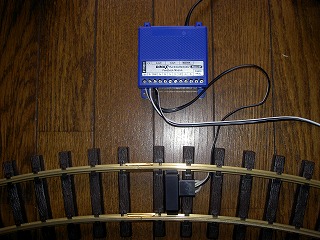
いきなり線路に設置するのでなく、まず、動作テストをします。、マニュアルに図が掲載されているとおりにフィードバックモジュールとトラックコンタクトを接続するとともに、セントラルステーション、コンピュータインターフェイス、フィードバックモジュールを接続します。
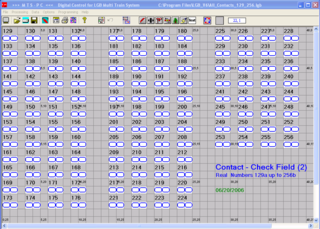
MTS-PCがインストールされたフォルダの中に、「All_Contacts_129_256.lgb」がありますので、Fileメニューの「Open Track Layout」から開きます。ずらりとトラックコンタクトが並んだレイアウト?が表示されます。
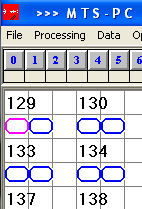
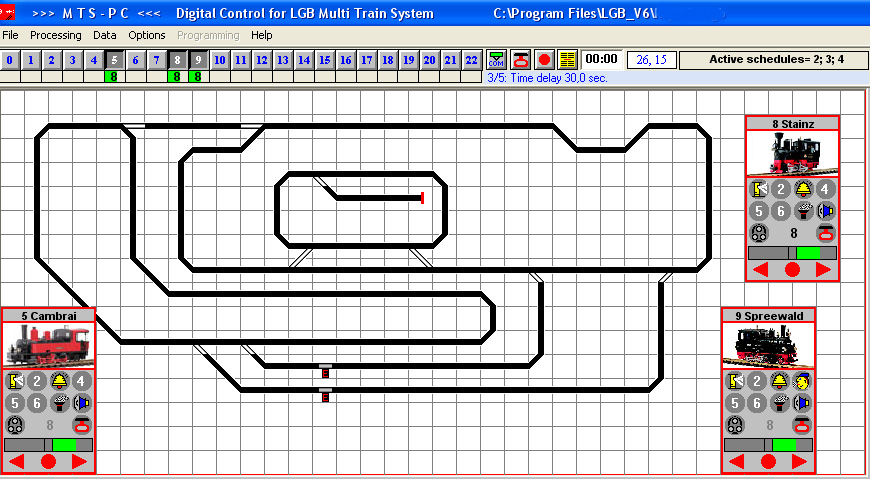
 COMポートを指定した後、Processingメニューから、First Startを選びます。トラックコンタクトに磁石を近づけると、画面上で該当番号のトラックコンタクトが、青からピンクになり、2秒で青に戻ります。次の図は129aが動作した瞬間です。
COMポートを指定した後、Processingメニューから、First Startを選びます。トラックコンタクトに磁石を近づけると、画面上で該当番号のトラックコンタクトが、青からピンクになり、2秒で青に戻ります。次の図は129aが動作した瞬間です。
【3】 トラックコンタクトの線路への設置と配線
自分のレイアウトの必要な線路の位置にトラックコンタクトを設置し、配線します。
【4】 制御用ソフトウェア(MTS-PC)へのトラックコンタクトの登録
MTS-PCの画面上の線路に、トラックコンタクトを配置します。配置するとトラックコンタクトの設定画面が現れますので、必要な項目を設定します。
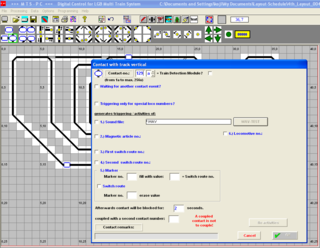 最初に、トラックコンタクトの番号を入力します(この番号は一度入力すると変更できません。間違えた場合画面上から一度トラックコンタクトを削除して、やり直す必要があります。)。 次に、各設定項目を入力しますが、私の場合は、「Afterwards contact willl be blocked for:」の項目だけです。デフォルトの2秒にしてあります。この値はあとから変更できますので、動作確認ができるまでは、5秒等長めにしておいた方が、わかりやすくていいと思います。
最初に、トラックコンタクトの番号を入力します(この番号は一度入力すると変更できません。間違えた場合画面上から一度トラックコンタクトを削除して、やり直す必要があります。)。 次に、各設定項目を入力しますが、私の場合は、「Afterwards contact willl be blocked for:」の項目だけです。デフォルトの2秒にしてあります。この値はあとから変更できますので、動作確認ができるまでは、5秒等長めにしておいた方が、わかりやすくていいと思います。
トラックコンタクトを設置したら、底面にマグネットをつけた機関車を走らせてみましょう。スケジュールを書く必要はありません。ユニバーサルリモートやロコリモートで普通に走らせます。
うまく動作すると、機関車がトラックコンタクトを通過する毎に、画面上の該当箇所のトラックコンタクトが青からピンクに変色し、設定した時間を過ぎると、青に戻ります。
注 MTS-PCのOptionsメニューのTypes of Automatic ControlをContact Controlにすると、ピンクから青にもどります。Types of Automatic ControlをSchedule controlにしていると、ピンクのまま戻りません。(1月3日に追記)
ここで、うまく色が変わらない場合は、配線や設定を見なおします。 無事成功したら、いよいよスケジュールを書いてみましょう!
【5】 MTS-PC用のスケジュールの作成と運行
サンプル
129aを使って、129aを通過したら停止、20秒後に、出発という動作を繰り返します。スケジュールの開始時は、機関車は129aを通過した状態にしてください。
A *初期化
!, START *ラベル「START」
L, 1, B, +7 *機関車1を停止状態から、速度7加速。
K, 129a, B *トラックコンタクト129aを列車が通過するまで待つ。
L, 1, B, -14 *機関車1を速度14減速(7から14減らすと停止します。-7でもいいです)。
Z, 200 *20秒待ちます。
G, START *「START」へジャンプする(無限ループ)。
E *終了
☆説明しようと思うと大変ですね!
そこで、今回は、Feedback Interface(Massoth社製)とTrack Contactを増設することにしました。実は、1個のFeedback Interfaceに8個のTrack Contactを接続できるのですが、すでに、8個接続しており、今回の9個目となり、Feedback Interfaceの増設が必要になります。
Feedback Interfaceの増設は、既設のFeedback Interfaceの「Slave」端子と、新設のFeedback InterfaceのSlave端子を4芯のモジュラーケーブルで繋ぎます。あとは、Track Contactを接続すればOKです。

 増設した場所は図の位置です。
増設した場所は図の位置です。 こんな運転ができるようになりました。増設したTrack Contactは、ビデオの中では2回働いています。
こんな運転ができるようになりました。増設したTrack Contactは、ビデオの中では2回働いています。・1回目(前進)にリバース区間に入る前に、Threeway Switchを直進から右折に切り替え
・2回目(後進)にリバース区間を通過した後に、列車を停止させ、前進に切り替え出発
(動画では、2編成同時に運行していますので、走行音が2つ聞こえます。)
今回は、Electric Uncouplerを2台使って、1両のディーゼル機関車で、2組の貨車の編成を切り離したり、連結したりする運転をしてみました。(MTSとコンピュータで制御してます。)
実は、以前に「車両の切り離し・・・Electric Uncoupler, 150 mm(LGB10560)」で、車両によっては、切り離しがうまくいかないと書いたのですが、逆に考えれば、うまく切り離しできる車両の組み合わせを選べばいいのです。あと、列車の速度と貨車を増やして試行錯誤したところ、今回の編成ではほぼ100%切り離しができました。
今回の場合も、列車の位置検出をFeedback InterfaceとTrack Contact、コンピュータで行っています。
Scheduleを書いてみました。MTS-PCとFeedbackInterfaceとの関係をみながら、とりあえず、往復運転ができるようにしてみました。
以前にも書きましたが、MTS-PCソフトウェアは、今ひとつ使い勝手が悪いですが、良くできていると感じさせられます。Scheduleを書くための構文がもっと充実していたら、言うことありません。
というわけで、往復運転の動画です。線路の両端に黒いTrackContact(17100)があります。
TrackContact→FeedbackModule→CentralStation2→ComputerInterface
→MTS-PC
という流れでTrackContactの通過情報がコンピュータに伝わり、MTS-PCで列車を制御しています。
コンピュータとMTS-PCソフトウェアで列車を制御するために、列車の位置を検出する必要があります。たとえば、次のようなことをしたいと思います。
・駅で列車を停止させる
・ポイントの手前で列車を停止し、ポイントを切り替え、別の列車を走行させる
・トンネルの手前で警笛を鳴らす
LGBのMTSでは、Feedback Interface(55070)とTrack Contact(17100)、EPL Loco Magnetを使い、MTS-PCソフトウェアでScheduleを作成することで、上記のような運転が実現します。
ただし、LGBのFeedBack Interface(55070)は品薄で、Massoth社のFeedback Moduleを入手しました。MassothのFeedbackInterfaceはMTS Central Station2でも動作します。(うちの鉄道はまだ2なのです。)
また、EPL Loco MagnetもMassothのLocomagnetにしました。
それでは、今から、室内用のScheduleを書いてみます。うまく動いたら、動画をアップします。
Feedback Interface(55070)とTrack Contact(17100)
Locomagnetを動力車の底面に両面テープで貼り付けたところです。
2月24日の「コンピュータによる制御」では、とりあえず、MTS Computer Interface(55060)を使って簡単なスケジュールを書いて自動運行させるところまでできました。
本当は、次の段階として、列車の位置の検出に挑戦する予定でしたが、それに必要なFeedback Interface等の到着が遅れていて、まだ、実現できていません。
そこで、今日は、屋外で3つの列車を自動運行してみることにしました。使用するMTSのソフトウェア(MTS-PC)は、使い勝手はそれほどよくないように思いますが、最低必要な機能はそろっている感じがします。
我が家のレイアウトは、3つのエンドレスループがあり、各ループがポイントを経由してつながっています。つまり、各編成がループ内を走るようにポイントを設定しておけば、衝突なしに3編成同時に走行できるわけです。今回は、その状態で、3つの編成を別々に、停車→加速→走行→減速→停止の繰り返しを行わせました。
 3つの列車を同時に制御するには、各編成用のスケジュール(制御プログラム)を3つ書いて保存しておきます。
3つの列車を同時に制御するには、各編成用のスケジュール(制御プログラム)を3つ書いて保存しておきます。
プログラムは、
初期化→※ラベル→速度8まで加速→○秒間そのまま→速度0まで減速
→○○秒間そのまま→「※ラベル」へジャンプ
という無限ループです。これを、動力車のID番号ごとスケジュール1、スケジュール2、スケジュール3と3つ書いて保存します。
もう一つメインになるプログラムを書きます。
初期化→スケジュール1実行→○秒間そのまま
→スケジュール2実行→○秒間そのまま
→スケジュール3実行→○秒間そのまま→終了
メインプログラムを実行させると、3つの編成がそれぞれのスケジュールに従って独立して、走行・停車を繰り返します。
今は、○秒間で走行、停止を繰り返していますので、トンネルやカーブなど、あらゆるところで、止まってしまいます。でも、これまでのように、走らせたままよりは、止まってはまた走り出すことで、ずいぶんと、見ていて楽しくなってきました。ときどき、うまく駅の前で止まってくれたりすると、結構、気分がいいものです。
Feedback Interfaceによる列車通過の検知ができるようになると、駅の前で停車させることもできるようです。来週か再来週になりそうですが・・・!
2月24日の「コンピュータによる制御」では、とりあえず、MTS Computer Interface(55060)を使って簡単なスケジュールを書いて自動運行させるところまでできました。
本当は、次の段階として、列車の位置の検出に挑戦する予定でしたが、それに必要なFeedback Interface等の到着が遅れていて、まだ、実現できていません。
そこで、今日は、屋外で3つの列車を自動運行してみることにしました。使用するMTSのソフトウェア(MTS-PC)は、使い勝手はそれほどよくないように思いますが、最低必要な機能はそろっている感じがします。
我が家のレイアウトは、3つのエンドレスループがあり、各ループがポイントを経由してつながっています。つまり、各編成がループ内を走るようにポイントを設定しておけば、衝突なしに3編成同時に走行できるわけです。今回は、その状態で、3つの編成を別々に、停車→加速→走行→減速→停止の繰り返しを行わせました。
3つの列車を同時に制御するには、各編成用のスケジュール(制御プログラム)を3つ書いて保存しておきます。
プログラムは、
初期化→※ラベル→速度8まで加速→○秒間そのまま→速度0まで減速
→○○秒間そのまま→「※ラベル」へジャンプ
という無限ループです。これを、動力車のID番号ごとスケジュール1、スケジュール2、スケジュール3と3つ書いて保存します。
もう一つメインになるプログラムを書きます。
初期化→スケジュール1実行→○秒間そのまま
→スケジュール2実行→○秒間そのまま
→スケジュール3実行→○秒間そのまま→終了
メインプログラムを実行させると、3つの編成がそれぞれのスケジュールに従って独立して、走行・停車を繰り返します。
今は、○秒間で走行、停止を繰り返していますので、トンネルやカーブなど、あらゆるところで、止まってしまいます。でも、これまでのように、走らせたままよりは、止まってはまた走り出すことで、ずいぶんと、見ていて楽しくなってきました。ときどき、うまく駅の前で止まってくれたりすると、結構、気分がいいものです。
Feedback Interfaceによる列車通過の検知ができるようになると、駅の前で停車させることもできるようです。来週か再来週になりそうですが・・・!